月面着陸に成功したSLIM
JAXAの月惑星探査プロジェクトSLIM(Smart Lander for investigationg Moon)は、2023年9月7日に打ち上げが行われ、2024年1月20日午前0時20分に月面へのピンポイント着陸を果たしました。
SLIMは月への高度着陸技術の実証と軽量な月惑星探査機システムを実現し、月惑星探査の高頻度化に貢献するという2つの目的をもって月に到達しました。
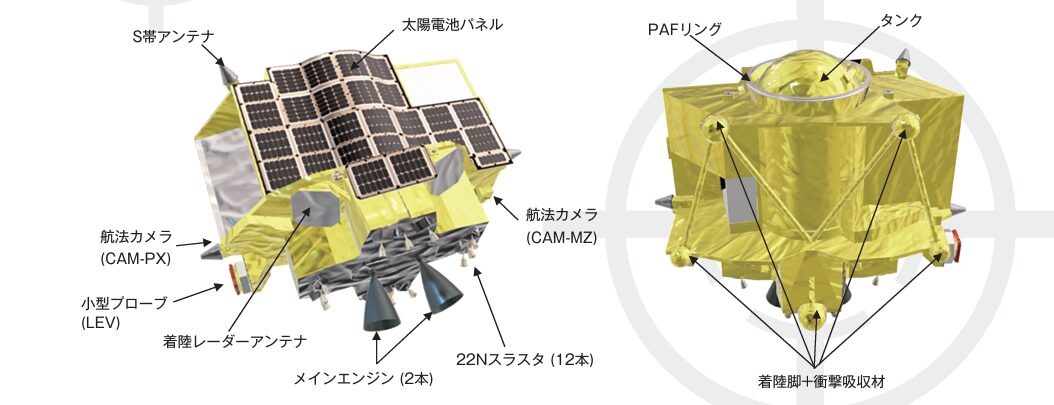
探査機のサイズは高さ2.4m、縦1.7m、横幅2.7mで、着陸時の重量は200㎏です。
ミッションの成功基準(サクセスクライテリア)
SLIMミッションは2つの目的に対して3段階の成功基準を定めていました。
- ミニマムサクセス
- 小型軽量な探査機による月面着陸を実施する。それにより以下の2項目を達成する
- 高精度着陸に必須の光学照合航法を、実際の月着陸降下を実施することで検証する。
- 軽量探査機システムを開発し、軌道上動作確認を行う。
- 小型軽量な探査機による月面着陸を実施する。それにより以下の2項目を達成する
- フルサクセス
- 制度100m以内の高精度着陸が達成されること。具体的には高精度着陸航法系が正常動作し、誘導則に適切にフィードバックされ、着陸後のデータ解析により着陸達成に至る探査機の正常動作と着陸制度達成が確認されること。
- エクストラサクセス
- 高精度着陸に関する技術データ転送後も、日没までの一定期間、月面における活動を継続し、将来の本格的な月惑星表面探査を見据え、月面で活動するミッションを実施する。
世界初が沢山あった着陸!
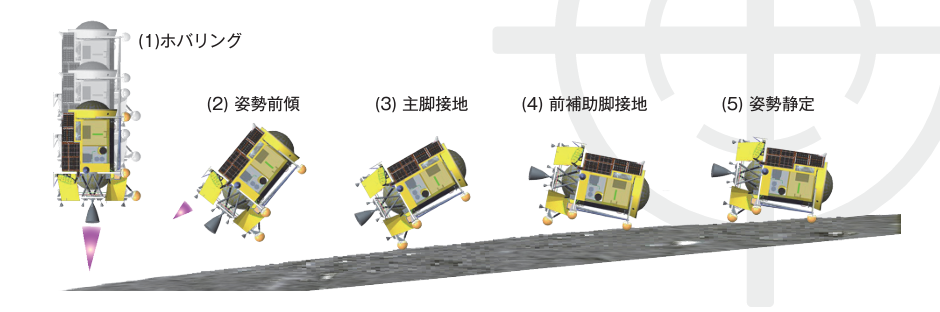
今回のSLIMの着陸には世界初が沢山ありました。月面に着陸態勢に入ったSLIMは着陸前にホバリングを行います。その際に小型探査機、超小型月面探査ローバ(LEV-1)と変形型月面ロボット(LEV-2)の2つを放出し、その後本体を前傾させて、倒れるように着地を行う予定でした。
この溶出されたLEV-1、LEV-2による複数ロボットによる同時月面探査は世界初となり、完全自立ロボットによる月面探査も世界初の偉業となりました。
日本初の月面探査ロボットになったSORA-Q
この放出された2つのロボットの中でも日本の玩具メーカータカラトミーが手掛けたLEV-2、通称「SORA-Q」はレプリカモデルも発売され、月面着陸後には入手困難にもなりました。

このSORA-Qには、宇宙兄弟とのコラボモデルも発売されていて、そちらは限定300台という激レアSORA-Qになっています。(※黄色の部分が青になった特別仕様)

このLEV-2は月面に放出された後、電源がONとなり、球体から走行用に展開され周辺映像を撮影し、撮影した画像からSLIM探査機との位置関係を割り出して、SLIM探査機から兜坂るように移動します。そしてSLIM探査機が映るようにも撮影して、走行データも合わせたそれらデータをLEV-1経由で地球に送信するという役割を果たしました。
その映像の1つが以下の写真で、SLIM探査機は予定とは異なる着地となってしまっていますが、その様子をしっかりと撮影し、地上に送ってきました。写真中央にはノイズが入ってしまっていますが、これこそアマチュア無線の電波でSSTV(スロースキャンTV)のように送信した痕跡です。

その後も活動を続けているSLIM
着陸姿勢が良くないため、太陽光パネルに当たる太陽光が不十分であるため、予定しているようなスケジュールでの運用ができていませんが、それでもSLIMは今現在、月面場で稼働している探査機です。
2024年1月31日に活動を休止し、14日間続く「夜」の時間は静かに待ちます。そして太陽光があたる次の14日間は活動再開が可能になります。実際2月25日には太陽電池が向いている西に太陽が傾き始めたタイミングでSLIM探査機の電源をONにして活動を開始しました。3月1日には、また太陽光パネルで日照をとらえることができなくなったため、再び休止し、次の起動を待つことになります。
SLIMの活動は今後も注目があつまります。